
Este projeto consiste praticamente da interpretação de dados recebidos pelos sensores acoplados na luva, reconhecendo os padrões que indicam que a mão está posicionada da maneira correta para representar cada letra em LIBRAS. Para isto, a equipe decidiu utilizar sensores flex, acelerômetro e sensores de contato, como na figura a seguir.
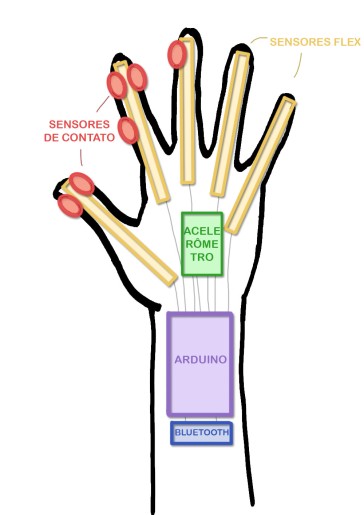
Essa escolha foi feita a partir do nosso conhecimento sobre o problema e sobre o funcionamento de cada tipo de sensor. Leia a seguir quais os motivos que nos levaram a essas escolhas e encontre também informações sobre estes sensores.
6.1 Sensores Flex

O sensor flex é um resistor variável, cuja resistência aumenta com a flexão do sensor. Quanto mais flexionado, maior a resistência medida. Para o projeto ALFALUVA isso significa que poderemos identificar o quanto cada dedo está dobrado, possibilitando diferenciar os sinais, como no exemplo da Figura a seguir.

O valor da resistência do sensor pode variar na casa das dezenas de kilo ohms. De acordo com a referência encontrada pode-se obter valores de aproximadamente 30kΩ com o sensor completamente estendido e até 70kΩ quando dobrado a 90°. Porém, durante a realização dos testes, os valores encontrados foram um pouco divergentes.
Para conectar o sensor ao Genuino utilizamos o seguinte esquemático:

Para a realização dos testes iniciais, utilizamos um resistor de 47kΩ (como sugerido na imagem) e, posteriormente, um resistor de 22kΩ. Com isso, concluímos que para o nosso projeto o resistor de 22kΩ ofereceu melhores resultados. Percebemos também que a resistência de cada um dos cinco sensores flex é diferente para a mesma posição. Por estes motivos aconselhamos que sejam realizados vários testes antes de começar a implementação do projeto em si.
O sensor comprado pela equipe foi o da Spectra Symbol de 4,4″ (datasheet). O fisicamente o funcionamento deste sensor está explicado na seção Conductive Ink Based deste site, mas se você está procurando informações sobre o uso do sensor, indicamos as seguintes fontes:
- Neste link você pode encontrar toda introdução sobre o sensor flex, como conectá-lo ao Genuino e um programa exemplo, que lhe permitirá começar a explorar o funcionamento deste sensor.
- Além disso, neste vídeo há uma explicação simples sobre o funcionamento deste sensor e do programa exemplo.
6.2 Acelerômetro
O acelerômetro é um sensor que mede a aceleração de um objeto (ligado a ele) em relação à gravidade. Este tipo de sensor é muito utilizado nos smartphones e vídeo games para captar o movimento do dispositivo. Neste projeto o acelerômetro será utilizado para a obtenção dos movimentos angulares da mão, já que alguns sinais se diferenciam de outros pela sua movimentação, como por exemplo as letras “I” e “J”:

O acelerômetro escolhido foi o MMA7361 pela sua facilidade de utilizar e por ser acessível para a equipe. Ele é um acelerômetro de três eixos, possui alta sensibilidade e baixo consumo de energia.

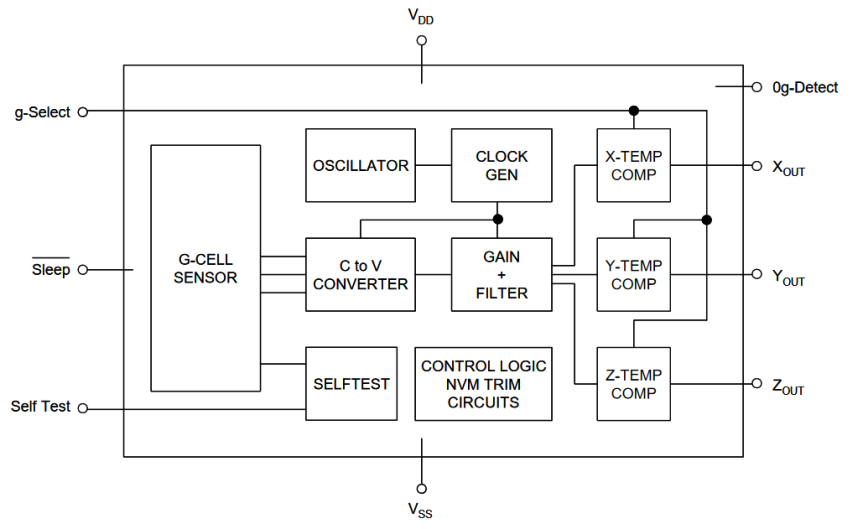
O circuito interno do acelerômetro, quando ligado, faz com que as saídas X, Y e Z possuam tensões variadas de acordo com o ângulo que o dispositivo se encontra em relação à gravidade da Terra. Com o acelerômetro conectado ao Arduino, os valores de tensões referentes aos pinos de saída dos eixos (Xout, Yout e Zout, conforme a figura abaixo) são convertidos, via conversor A/D presente no Genuino, em valores utilizáveis e precisos de acordo com o movimento do acelerômetro.
Os pinos do acelerômetro serão conectados aos seguintes pinos do Arduino:

Utilizando o MMA7361 foi necessário ter acesso às seguintes informações:
- Será utilizada como base a biblioteca pronta do acelerômetro disponível neste link.
- No blog FILIPEFLOP é possível encontrar informações mais detalhadas sobre o MMA7361 e sua utilização.
- Por fim, neste vídeo você pode encontrar uma pequena aplicação deste sensor.
Datasheet do acelerômetro MMA7361:
6.3 Sensores de Contato
Mesmo com os recursos supracitados, ainda teríamos dificuldades em identificar as letras que possuem a mesma orientação e a posição dos dedos, como é o caso das letras “U” e “V” (Figura a seguir).
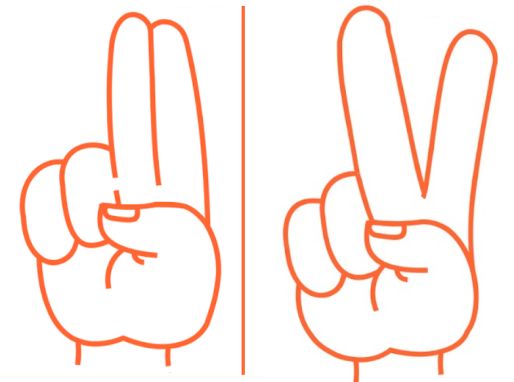
Por este motivo resolvemos desenvolver um tipo muito simples de sensor, que funciona basicamente como uma chave, possui apenas duas posições: aberta e fechada. O sensor pode ser visto na figura abaixo.

Este sensor consiste apenas de um fio condutor e uma pequena área de cobre que serão colocados em pontos estratégicos da luva, de maneira que seja possível determinar se os dedos estão encostados ou não.
No caso das letras “U” e “V”, por exemplo, colocaremos um par de placas de cobre entre os dedos indicador e médio. Assim, quando for feito o sinal “U” o sensor mostrará que existe corrente circulando através do contato entre os sensores, caso contrário, o sinal será interpretado como um “V”.
